Control de Velocidad y Regulacion de Voltaje en Sistemas de Generación
1. Introducción y Contexto
Los sistemas de generación eléctrica en las industrias de petróleo, gas y petroquímica operan frecuentemente en modo aislado (isla), sin conexión a redes eléctricas públicas. Esta condición impone desafíos únicos en el control de frecuencia (gobernador) y voltaje (AVR), requiriendo estrategias especializadas para garantizar estabilidad, confiabilidad y continuidad operacional.
Desafíos de los Sistemas Aislados
⚡ Baja Inercia del Sistema
Sin la inercia de grandes redes interconectadas, los transitorios de frecuencia y voltaje son más severos ante cambios de carga o contingencias.
⚙️ Reparto de Carga Crítico
Múltiples generadores deben compartir MW y MVAR de manera equilibrada sin comunicaciones complejas ni fluctuaciones.
🔌 Arranque de Motores Grandes
Corrientes de arranque de 6-7× la nominal imponen demandas transitorias severas de MW y MVAR, comprometiendo la estabilidad.
🛡️ Protección y Load Shedding
Esquemas rápidos de desprendimiento de carga son esenciales para mantener estabilidad ante pérdida de generadores.
Objetivos del Control
El sistema de control de generación en modo aislado debe lograr:
- Frecuencia estable: Mantener 60.00 Hz ±0.1 Hz bajo condiciones normales
- Voltaje regulado: Mantener voltaje nominal ±1% en barras principales
- Reparto automático: Distribución proporcional de MW y MVAR entre generadores
- Estabilidad transitoria: Recuperación rápida (<5 s) ante perturbaciones
- Protección coordinada: Aislamiento selectivo de fallas en <100 ms
2. Operación en Modo Isla vs Modo Interconectado
Comprender las diferencias fundamentales entre operación aislada e interconectada es esencial para diseñar estrategias de control apropiadas.
| Característica | Modo Isla (Aislado) | Modo Interconectado (Grid-Tied) |
|---|---|---|
| Inercia del Sistema | ⚠️ Baja (solo generadores locales) | ✓ Alta (red completa) |
| Control de Frecuencia | Gobernadores locales (droop o isócrono) | Red impone frecuencia (gobernador en standby) |
| Control de Voltaje | AVR con droop reactivo o corriente cruzada | AVR controlado por PF o VAR target |
| Respuesta Transitoria | ⚠️ Rápida y severa (Δf, ΔV grandes) | ✓ Amortiguada por red |
| Arranque Motor Grande | ⚠️ Requiere reserva N+1 o N+2 | ✓ Red absorbe transitorio |
| Load Shedding | Crítico (UFLS + contingencia) | Menos frecuente |
| Sincronización | Entre generadores internos | Con red externa (check-sync) |
| Protección | Diferencial 87G/87B esencial | Diferencial + direccional 67, distancia 21 |
💡 Ventaja del Modo Interconectado
En modo interconectado, la red eléctrica actúa como una fuente de potencia infinita que:
- Impone la frecuencia al sistema local (gobernadores no regulan frecuencia)
- Proporciona reserva de potencia MVAR para arranques y transitorios
- Amortigua variaciones de carga sin fluctuaciones significativas de voltaje
- Permite operación con factor de potencia constante o control VAR
⚠️ Desafío del Modo Isla
Sin la red de respaldo, los generadores locales deben responder instantáneamente a:
- Cambios bruscos de carga (arranque/paro de motores, compresores)
- Pérdida súbita de un generador (disparo mecánico o eléctrico)
- Cortocircuitos trifásicos con depresión severa de voltaje
- Oscilaciones de potencia entre generadores mal sincronizados
Transición entre Modos
Sistemas híbridos pueden operar en ambos modos, requiriendo:
- Transferencia automática: Detección de pérdida de red y cambio a modo isla sin interrupción
- Sincronización: Check-sync antes de reconexión a red (match de V, f, θ)
- Reconfiguración de control: AVR cambia de control PF a droop, gobernador activa regulación
- Load shedding preventivo: Si la carga excede capacidad local antes de aislar
3. Evolución Tecnológica de Sistemas de Control
El control de gobernadores y AVR ha evolucionado desde sistemas mecánicos y analógicos hasta soluciones digitales avanzadas con comunicaciones en red.
Era Mecánica/Hidráulica (1950-1970)
Gobernadores
- Regulador centrífugo (flyball) Woodward
- Actuadores hidráulicos para válvula combustible
- Droop mecánico (4-5% típico) no ajustable en operación
- Sin reparto de carga automático
AVR
- Reguladores electromecánicos con relés
- Reóstatos para ajuste manual de voltaje
- Tiempo de respuesta lento (>1 s)
- Sin compensación reactiva automática
Era Analógica (1970-1990)
Gobernadores
- Woodward 2301A: Control electrónico analógico
- Droop ajustable (2-6%) con potenciómetros
- Speed bias para reparto de carga simple
- PID analógico para estabilidad mejorada
AVR
- Basler SR7, Brush A30 (legacy)
- Droop reactivo con CT y resistor externo
- Tiempo de respuesta ~200 ms
- Protección básica (OEL, UEL)
Era Digital (1990-2010)
Gobernadores
- Woodward 505E, MicroNet TMR
- Algoritmos PID digitales avanzados
- Auto-tuning y adaptive control
- Comunicación Modbus RTU
AVR
- Basler DECS-250, ABB UNITROL 1000
- Procesamiento DSP, tiempo <80 ms
- Limitadores programables (OEL, UEL, V/Hz, PQ)
- Corriente cruzada digital
Era en Red (2010-Presente)
Gobernadores
- Peer-to-peer network load sharing (Ethernet)
- Reparto isócrono sin master-slave
- Integración IEC 61850
- Predictive control y machine learning
AVR
- Brush A3100, ABB UNITROL 6000, Siemens SIMOREG DC Master
- Network load sharing vía Ethernet
- Redundancia integrada (hot-swap)
- Comunicación IEC 61850, DNP3
🔍 Tendencia Actual
Los sistemas modernos integran gobernadores y AVRs en plataformas PMS (Power Management System) que centralizan:
- Monitoreo en tiempo real (SCADA/HMI)
- Load sharing automático multi-generador
- Load shedding inteligente basado en prioridades
- Sincronización y transferencia automática
- Diagnóstico predictivo y event logging
4. Control de Velocidad del Gobernador
El gobernador regula la velocidad mecánica de la turbina para mantener la frecuencia eléctrica en sistemas aislados e interconectados. Sus modos principales son:
- Droop: Relación lineal entre cambio de frecuencia y variación de carga (ej. 5 % droop = 5 % Δf/ΔP). Permite reparto proporcional sin comunicación.
- Isócrono: Mantiene frecuencia fija (Δf=0) ajustando P. Requiere un maestro que fije el setpoint; en interconectado la red asume este rol.
- Speed Bias: Droop dinámico que ajusta la pendiente según inercia y reserva, mejorando estabilidad ante perturbaciones.
- Peer-to-Peer: Red descentralizada; cada gobernador comparte estado con pares vía Ethernet, logrando isócrono sin maestro.
Modo Isla vs Interconectado: En isla solo droop e isócrono local; en interconectado dogovernor queda inactivo y la red impone frecuencia.
Parámetros Clave
- Droop %: 2–6 % típico (ajustable)
- Setpoint frec. (fs): 59.5–60.5 Hz
- Rango P: 0–100 % Pnom
- Tiempo de reacción: 50–200 ms
- PID: KP, KI, KD digitales
Respuesta Dinámica
Tras un cambio de carga, la frecuencia cae rápidamente y el gobernador actúa para restablecerla:
Comparativa Droop vs Isócrono
| Característica | Droop | Isócrono |
|---|---|---|
| Frecuencia | Variable con P | Fija fs |
| Reparto | Proporcional sin comunicación | Requiere maestro o red |
| Estabilidad | Menor capacidad amortiguamiento | Alta precisión fs |
| Complejidad | Baja | Media (sincronismo) |
5. Estrategias Avanzadas de Gobernador
Más allá de droop e isócrono, los gobernadores modernos implementan técnicas avanzadas para optimizar reparto de carga y estabilidad bajo condiciones variables.
5.1 Speed Bias Control
El speed bias ajusta dinámicamente el droop en función de:
- Inercia del generador: Mayor inercia reduce droop, mejorando amortiguamiento.
- Carga conectada: Aumenta droop con carga ligera para evitar oscilaciones.
- Reservas de potencia: Modifica pendiente para garantizar reserva N+1.
5.2 Peer-to-Peer Load Sharing
Comunicación directa entre gobernadores vía Ethernet permite:
- Reparto isócrono sin maestro, cada unidad ajusta P según estado de pares.
- Elimina punto único de falla; redundancia inherente.
- Sincronismo automático continuo.
5.3 Control Predictivo y Adaptativo
Algoritmos digitales avanzados emplean modelos del sistema y aprendizaje para:
- Predicción de transitorios: Ajustes de PID antes de ocurrir la perturbación.
- Auto-tuning: Calibración en línea de parámetros KP, KI, KD.
- Reducción de sobreimpulso: Mínima oscilación al cambiar carga.
5.4 Sincronización y Transferencia Automática
En sistemas híbridos isla/interconectado las estrategias incluyen:
- Check-Sync: Comparación de fase, frecuencia y voltaje previo a reconexión.
- Transferencia Seamless: Conmutación automática sin interrupción perceptible.
- Respaldo N+1: Gobernador actúa como maestro temporal si falla la red.
5.5 Integración con Sistemas de Gestión de Energía (PMS)
El gobernador se integra en un PMS (Power Managment System) centralizado que coordina:
- Supervisión SCADA: Visualización en tiempo real de P, f y eventos.
- Comandos remotos: Ajuste de setpoints y modos de operación.
- Load Shedding: Desprendimiento de cargas basado en reserva y prioridades.
Ejemplo de Aplicación: En un PMS de 3 GTG, al dispararse uno:
- Speed bias reduce droop para reparto rápido en 2 GTG restantes.
- Peer-to-peer ajusta setpoints en <100 ms.
- PMS inicia load shedding de cargas no críticas simultáneo al reparto P/MVAR dependiendo de la reserva rotante y configuracion del sistema.
6. Control de Voltaje (AVR)
El AVR (Automatic Voltage Regulator) ajusta la excitación del generador para mantener el voltaje terminal dentro de límites estrechos. Sus principales funciones son:
- Regulación V/Hz: Ajusta la tensión proporcional a la frecuencia para proteger el aislamiento a bajas velocidades.
- Control de Factor de Potencia: Opera en modo PF fijo (e.g., 0.9 lagging) o PF variable para gestión de carga de la red.
- Limitadores programables: OEL (Over Excitation), UEL (Under Excitation), V/Hz, Ie, Umín, Ie mín.
- Compartición de potencia reactiva: CCC o intercambio de MVAR por señal analógica/digital.
El AVR en modo interconectado prioriza el soporte de voltaje de la red, operando en VAr target. En modo isla, debe compensar localmente variaciones de carga inductiva/capacitiva.
6.1 Curvas V/Hz y PF Target
6.2 Características de Modelos Modernos
ABB UNITROL 6000
- DSP de 32 bits, tiempo de respuesta <50 ms
- Limitadores OEL, UEL, V/Hz, PQ, Ie con 5 puntos configurables
- Comunicación Modbus TCP/IP, IEC 61850
- Redundancia dual-channel para alta disponibilidad
Brush A3100
- Formato compacto: montaje riel DIN o panel
- CCC digital interna sin hardware adicional
- HMI local con display gráfico y menú intuitivo
- Hot-swap y soporte de firmware remoto
Basler DECS-250N
- Protección Rotor Earth Fault integrada
- Load sharing Ethernet con peers
- Configuración vía software BESTCOMS
- Soporta hasta 4 GTGs en una red
Siemens SIMOREG
- AVR para excitación DC brushless
- Integración con PCS7 y Profibus
- Control vectorial y compensación MVAR
- Filtro armónico integrado
6.3 Selección e Integración
Al elegir un AVR para modo isla:
- Priorizar respuesta rápida <80 ms ante cambios de carga.
- Preferir modelos con CCC digital si hay múltiples GTG.
- Evaluar la facilidad de montaje (módulo vs rack)
- Revisar comunicaciones: Modbus/IEC 61850 para integración PMS.
7. Droop Reactivo
El droop reactivo asocia cambios en la tensión del generador con la demanda de potencia reactiva (MVAR), permitiendo reparto automático de MVAR entre unidades en paralelo sin comunicación digital.
7.1 Fundamento Teórico
Define una pendiente que relaciona ΔV/ΔQ similar al droop de frecuencia:
- Punto de operación nominal: Vnom, Q=0.
- Pendiente: típicamente 5–10 % drop en voltaje por 100 % de Qnom.
- Ecuación: V = Vnom – m·Q, donde m = droop reactivo.
7.2 Ejemplo de Curva V–Q
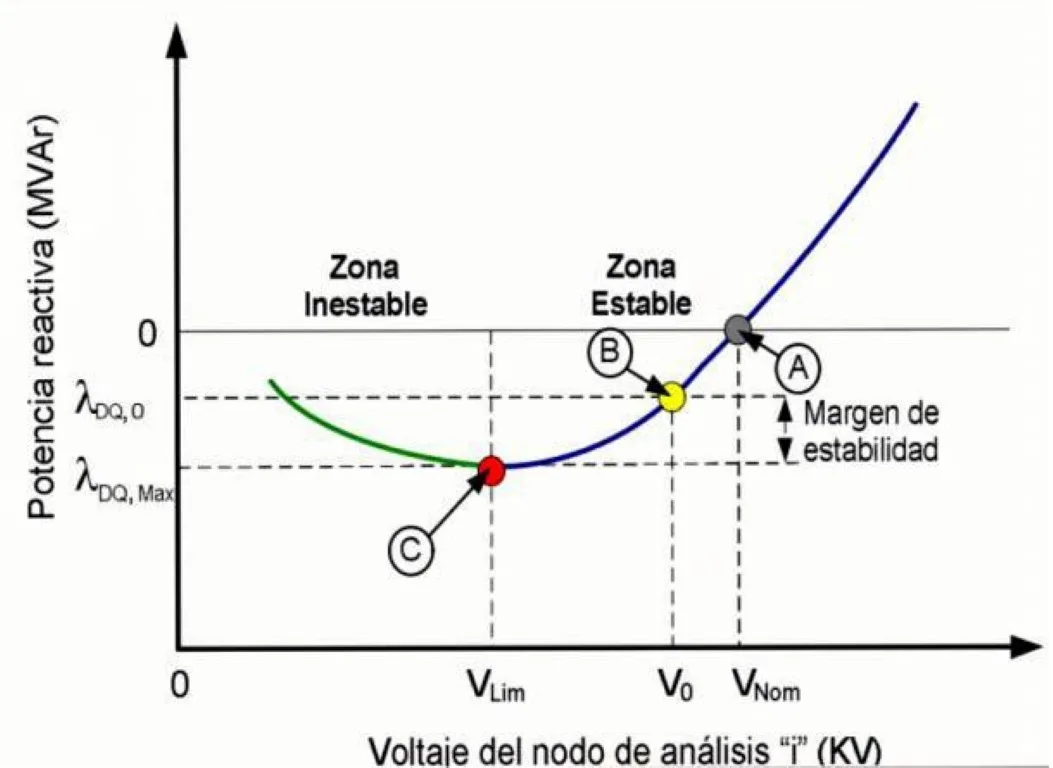
7.3 Ventajas y Desventajas
- Ventajas: Implementación simple, no requiere señal compartida.
- Desventajas: Cae el voltaje, precisión limitada y reparto imperfecto.
- Uso combinado: A menudo se combina con V/Hz para estabilidad bajo arranques.
7.4 Integración en AVRs Modernos
En AVRs como ABB UNITROL o Brush A3100, el droop reactivo se configura junto a otros limitadores:
- Ajuste de pendiente Q–V digital
- Limitadores OEL/UEL en base a puntos de droop
- Fallback a CCC o V/Hz si se dispone
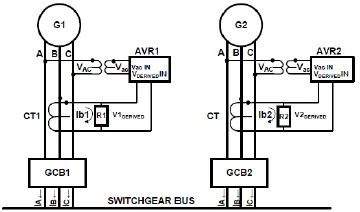
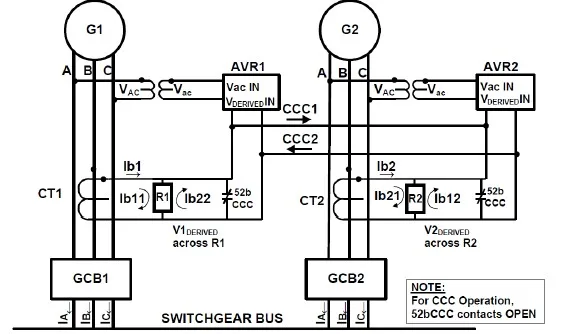
8. Compensación de Corriente Cruzada (CCC)
La Compensación de Corriente Cruzada (Cross Current Compensation) es una técnica de control reactivo en la cual los AVRs comparten señales de excitación para lograr un reparto equitativo de MVAR sin afectar el voltaje del sistema.
8.1 Principio de Operación
- Cada AVR lee su corriente de excitación (Ie).
- Las Ies se envían a un bus de comunicación o punto común.
- Se promedia la señal: Ie_avg = (∑Ie)/N.
- Cada AVR ajusta su MVAR de salida para que Ie_local = Ie_avg.
8.2 Grafico de compensacion de corriente cruzada
8.3 Ventajas y Consideraciones
Ventajas de CCC
- Voltaje constante (sin caída).
- Reparto preciso de MVAR.
- No requiere ajuste de droop.
- Compatible con AVRs digitales.
Consideraciones
- Requiere cableado de señales o red de datos.
- Complejidad de configuración inicial.
- Necesita filtrado para evitar oscilaciones.
- Fallback a droop si falla la comunicación.
8.4 Ejemplo Genérico de Implementación
En un sistema de 4 GTG con CCC:
- Cada AVR envía a un nodo maestro o bus digital.
- El nodo calcula Ie_avg y lo transmite de vuelta.
- Cada AVR compara Ie_local vs Ie_avg y ajusta excitación.
- Resultado: reparto equitativo de carga reactiva y voltaje estable.
9. AVRs Modernos y Comparativa de Modelos
Los reguladores de voltaje modernos incorporan DSP, comunicaciones y funciones avanzadas de control y protección. A continuación se analizan en detalle cuatro familias representativas.
ABB UNITROL 6000
Diseñado para grandes generadores síncronos, combina potencia de procesamiento con robustez industrial.
- DSP 32 bits: Frecuencia de muestreo 10 kHz, respuesta <30 ms.
- Limitadores: OEL, UEL, V/Hz, Vmin, Ie; 8 puntos configurables.
- Comunicaciones: Modbus TCP/IP, IEC 61850 GOOSE, HMI embarcado.
- Redundancia: Dual-channel hot-standby sin interrupción.
Brush A3100
Evolución del A30, con enfoque en modularidad y facilidad de integración en tableros.
- Formato compacto: Módulo DIN o montaje panel.
- CCC digital: Compartición interna de MVAR sin cableado extra.
- Display local: Menús gráficos y registro de eventos.
- Firmware remoto: Actualizaciones vía Ethernet sin apagar.
Basler DECS-250N
Solución consolidada con fuerte enfoque en protección de rotor y comunicaciones.
- Protección de rotor: Earth Fault, loss‐of‐field integrada.
- Load sharing: Ethernet y Modbus RTU.
- Software: BESTCOMSPlus para configuración y diagnósticos.
- Escalabilidad: Hasta 6 unidades en red.
Siemens SIMOREG DC Master
Aunque orientado a excitación DC, su control vectorial aporta precisión en MVAR.
- Control vectorial: Precisión <1% en MVAR.
- Comunicaciones: Profibus, Profinet, OPC UA.
- Filtrado armónico: DSP integrado para armónicos de excitación.
- Integración PCS7: Gestión centralizada en SCADA.
9.1 Comparativa de Rendimiento
| Característica | UNITROL 6000 | Brush A3100 | DECS-250N | SIMOREG |
|---|---|---|---|---|
| Tresp | ≤30 ms | ≤50 ms | ~80 ms | ≤40 ms |
| Comunicación | IEC 61850, Modbus | Ethernet, Modbus | Modbus RTU, Ethernet | Profinet, OPC UA |
| CCC | Opcional | Integrado | Opcional | N/A |
| Protección Adic. | Sí | No | Sí, rotor | Filtrado |
| Montaje | Panel/Rack | DIN/PANEL | Rack | Rack |
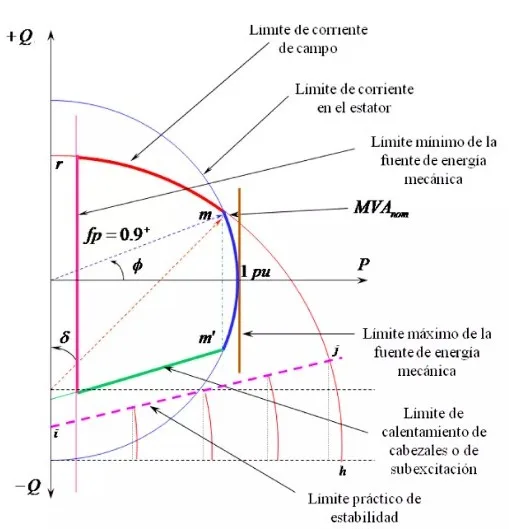
10. Curva de Capacidad P–Q
La curva de capacidad P–Q de un generador síncrono muestra la combinación de potencia activa (P) y reactiva (Q) que puede entregar de forma segura, respetando límites térmicos, de estabilidad y de aislamiento.
10.1 Factores que Definen los Límites Operativos
- Límite térmico del bobinado de armadura: Corriente máxima de armadura (Iₐ) para evitar sobrecalentamiento.
- Límite térmico del bobinado de campo: Corriente de excitación (Iₑ) que protege el rotor de daño térmico.
- Potencia máxima de la turbina: Tope de MW suministrados por el motor primo.
- Límite de mínima corriente de excitación: Q negativo mínimo para mantener estabilidad de voltaje.
- Límite de estabilidad en régimen permanente: Ángulo de torque rotor-estator (<90°) para evitar pérdida de sincronismo.
10.2 Consecuencias de Operar Fuera de la Curva
- Pérdida de sincronismo: La máquina puede salirse de paso si la excitación es insuficiente.
- Sobrecalentamiento de bobinados: Exceso de corriente acelera el envejecimiento del aislamiento.
- Daño mecánico: Estrés térmico y magnético genera fatiga y grietas.
- Reducción de vida útil: Ciclos repetidos fuera de curva acortan la duración del generador.
10.3 Protección Basada en la Curva de Capacidad
- Protección contra pérdida de campo (LOF): Relés ANSI 27/40 detectan caídas de Iₑ y desconectan el generador.
- Protección por sobrecarga térmica: Sensores monitorean temperatura de armadura y rotor.
- Relés de sobreexcitación (OEL): Controlan Iₑ para no exceder el límite de aislamiento.
- Protección diferencial del generador (87G): Aísla fallas internas basado en comparación de corrientes.
10.4 Normas Clave para Diseño y Protección
- IEEE C50.13: Límites térmicos y mecánicos de generadores síncronos.
- IEEE 115: Protocolos para pruebas de rendimiento de generadores.
- IEC 60034 (Partes 1, 3, 32): Requisitos generales y métodos de prueba.
- IEEE 32: Modelos de envejecimiento térmico y vida útil del aislamiento.
10.5 Selección de Punto de Operación
Para maximizar eficiencia y vida útil:
- Operar en 75–80 % de Pnom con Q ≈ 0 MVAR.
- Mantener 10–20 % de margen en Iₐ e Iₑ frente a límites.
- Evitar subexcitación excesiva para no caer en zona inestable.
- Verificar step load para asegurar que P–Q no excede curvas durante arranques.
11. Arranque de Motores Grandes
El arranque de motores de media/alta tensión impone corrientes de inrush de 6–8 × Inom que afectan severamente frecuencia y voltaje en sistemas aislados. A menudo se utilizan convertidores de frecuencia para reducir este pico y facilitar la integración con compresores de proceso.
11.1 Impacto en el Sistema
- Caídas de frecuencia: Rápida disminución Δf = (ΔP)/ (2H·Sbase)
- Depresión de voltaje: ΔV = Iinrush·Zsys
- Requerimiento de reserva: N+1 o N+2 para garantizar estabilidad
- Load Shedding: Desconexión automática de cargas no críticas para mitigar la caída
11.2 Arranque con Variadores de Media Tensión
Los variadores de frecuencia (VFD) limitan la rampa de corriente y tensión de motor, reduciendo inrush y suavizando el impacto:
- Control de rampa de voltaje y frecuencia en 0–100 Hz
- Arranque suave (<2 × Inom) y torque controlado
- Mejora de la capacidad de producción de compresores
- Integración con PMS para coordinar arranques y load shedding
11.3 Simulación de Arranque
11.4 Coordinación con Load Shedding
En escenarios de arranque y fallo simultáneo de GTG:
- El PMS detecta caída de frecuencia/voltaje > umbrales.
- Activa load shedding de cargas predefinidas (motores auxiliares).
- Permite arranques secuenciales sin perder sincronismo.
11.5 Buenas Prácticas
- Estudios de estabilidad transitoria para cada motor crítico.
- Reserva de potencia giratoria mínima 20 % Pnom.
- Implementar rampas de VFD en combinaciones con droop/reactivo.
- Pruebas de load shedding sin interrumpir proceso.
12. Step Load Capability
La capacidad de “step load” es la habilidad del sistema de generación para absorber incrementos súbitos de carga sin comprometer la estabilidad. Este concepto integra no solo la respuesta de frecuencia sino también límites térmicos y de tensión del generador y del sistema.
12.1 Parámetros Críticos
- Magnitud del paso (ΔP): Fracción de Pnom agregada instantáneamente (ej. 5–15 %).
- Tiempo de estabilización (tresp): Duración para restablecer ±0.1 Hz y ±1 % V (<5 s ideal).
- Reserva giratoria: Capacidad de “short-term overload” en generadores (>110 % Pnom por minutos).
- Límites térmicos: Ia y Ie no deben exceder curvas de calor por más de 1–2 min.
- Coordinación de control: Ajuste temporal de droop o activación de CCC para repartir ΔP y ΔQ.
12.2 Estrategias de Mitigación
- Load Shedding preventivo: Desconexión rápida de cargas auxiliares si Δf excede umbral programado.
- Ajuste dinámico de droop: Reducción temporal de droop a 2 % para mayor contribución de P.
- Uso de VFDs: Arranques con rampa de voltaje/frecuencia en motores MV reducen Iinrush a 2–3×Inom.
- Control predictivo: Modelos en PMS anticipan ΔP y preajustan setpoints.
- Verificar curvas térmicas de generador (Ia, Ie) para step load repetidos.
- Ejecutar simulaciones de step load con modelos de inercia (H) y impedancia de red.
- Dimensionar spinning reserve N+1 para el mayor ΔP esperado.
- Configurar UFLS y shedding de contingencia con tiempos de respuesta <200 ms.
- Incluir HMI y alarmas de step load en el SCADA/PMS.
- Verificar curvas térmicas de generador (Ia, Ie) para step load repetidos.
⚠️ recordar
12.3 Recomendaciones de Diseño
13. Protección Eléctrica Integrada con Sistemas de Generación
Las protecciones eléctricas no solo aíslan fallas, sino que coordinan con los esquemas de control de frecuencia/voltaje y load shedding para mantener la estabilidad del sistema de generación.
13.1 Principios de Coordinación
- Detección rápida: Relés 87G/87B actúan en 20–50 ms para aislar fallas internas de generadores o buses.
- Aislamiento selectivo: Solo la zona afectada se desconecta, preservando el resto del sistema.
- Interacción con control: Al aislar un GTG por falla, el PMS reconfigura modos droop/CCC en generadores remanentes y activa load shedding si preciso.
- Interbloqueo con AVR: Protección de pérdida de excitación (27, 40) coordina con limitadores OEL/UEL del AVR.
13.2 Dispositivos ANSI Clave
| ANSI | Función | Tiempo Oper. | Integración |
|---|---|---|---|
| 27 | Under Voltage | 0.5–10 s | Deshabilita AVR al bajar V |
| 40 | Loss of Field | 0.5–2 s | Trip generador, alerta PMS |
| 50/51 | Overcurrent | 16–50 ms / 0.1–30 s | Protege GS, arranque motores |
| 87G | Generator Diff. | 30–50 ms | Trip GTG, reconfig. control |
| 87B | Bus Differential | 20–30 ms | Trip bus, load shedding |
13.3 Escenario de Falla y Recuperación
- Falla trifásica interna en GTG → 87G reconoce y abre breakers en <50 ms.
- PMS detecta pérdida de P y Δf > umbral → activa droop bus restante y CCC si disponible.
- Si Δf continúa descendiendo, dispara load shedding de etapas 1–4.
- AVR reconfigura límites OEL/UEL para nueva condición de carga.
- Al recuperar, sincroniza GTG en standby vía peer-to-peer o check-sync.
14. Filosofías de Load Shedding
El load shedding es la desconexión automática de cargas cuando la generación disponible no puede sostener la demanda, protegiendo la estabilidad del sistema. Se implementa en dos filosofías principales:
14.1 Underfrequency Load Shedding (UFLS)
Basado en la frecuencia, desconecta bloques de carga escalonadamente según umbrales de caída de f.
- Etapas de frecuencia: 59.5, 59.0, 58.5, 58.0 Hz típicos.
- Prioridades de carga: No críticas primero (bombas secundarias, iluminación).
- Retardos: 50–200 ms entre etapas para evitar chattering.
- Se complementa con rate-of-change-of-frequency para detección rápida de pérdida múltiple de GTG.
14.2 Contingency-Based Shedding
Desprendimiento basado en eventos de falla (disparo mecánico), calculando MW perdidos vs reserva.
- Cálculo: Carga a shed = Plost – SpinningReserve
- Velocidad: Comando en <100 ms tras falla detectada.
- Coordinación: PMS centralizado ordena grupos de cargas predefinidos.
14.3 Filosofía de Diseño en PMS
Un PMS moderno integra ambas filosofías y añade criterios de criticidad, tolerancia y reconexión:
- Categorización de cargas: Críticas (seguros, control) vs no críticas (iluminación).
- Reconexión automática: Al restablecer frecuencia, cargas reenganchan con rampa.
- HMI y alarmas: Dashboard para operador con estado y secuencia de shedding.
- Event logging: Registro de cada etapa con timestamp y Δf.
14.4 Ejemplo de Etapas UFLS
| Etapa | Freq. Umbral (Hz) | Carga Shed (%) | Prioridad |
|---|---|---|---|
| 1 | 59.5 | 10 | Iluminación secundaria |
| 2 | 59.0 | 15 | Bombas agua no críticas |
| 3 | 58.5 | 25 | Cargas HVAC |
| 4 | 58.0 | 50 | Compresores auxiliares |
14.5 Coordinación con Arranque de Motores
En sistemas con arranques VFD de compresores:
- Pre-shed ligeros cargas no críticas antes de rampa.
- Monitoreo RoCoF para anticipar falla múltiple.
- Reconexión gradual junto con secuencia de arranque.
15. Normativas y Estándares
La implementación de sistemas de control y protección debe cumplir con estándares internacionales que garantizan interoperabilidad, seguridad y calidad de potencia.
15.1 Calidad de Potencia
- IEEE 519: Límites de distorsión armónica (THD ≤5 % en barras de entrega).
- IEC 61000-4-30: Métodos de medición de parámetros de calidad de energía.
15.2 Protección y Coordinación
- ANSI/IEEE C37.2: Números de función de dispositivos de protección.
- IEC 60255: Requisitos de rendimiento para relés de protección.
- IEEE 242 (Buff Book): Buenas prácticas de coordinación de protecciones en sistemas industriales.
15.3 Control y Gobernador
- ISO 3046: Métodos de prueba y valores de rendimiento para turbinas de gas.
- IEC 60034-1: Requisitos generales de máquinas eléctricas.
- AGA 12: Estándares de metrología para turbinas de gas en medición de flujo.
15.4 Sistemas de Gestión de Energía (PMS)
- NERC PRC-002: UFLS mínimo de frecuencia para proteger redes interconectadas.
- IEC 61850: Comunicación digital para automatización de subestaciones y control de energía.
- IEC 60870-5-104: Telecontrol SCADA sobre TCP/IP.
15.5 Interrelación Teoría y Práctica
La teoría de control (droop, CCC, PID) y de protecciones (87, 50/51) se valida y coordina mediante estos estándares para asegurar:
- Interoperabilidad de dispositivos de distintos fabricantes.
- Operación segura dentro de límites térmicos y dinámicos.
- Consistencia en mediciones de potencia y calidad.
- Transición fluida entre modos isla e interconectado.
16. Casos de Aplicación
Ejemplos prácticos que ilustran la aplicación de estrategias integradas de control de frecuencia, voltaje, shedding y protección en diferentes escenarios industriales.
Caso 1: Plataforma Offshore 4 GTG
Un complejo offshore con cuatro GTG en paralelo alimenta sistemas críticos de compresión y tratamiento de gas.
- Control de Frecuencia: Peer-to-Peer isócrono para reparto isócrono sin maestro.
- Regulación Voltaje: CCC con V/Hz de respaldo para máxima estabilidad.
- Protección: 87G y UFLS en 4 etapas coordinadas con droop residual.
- Arranque Motores: Variadores MV con pre-shedding de 5% de carga no crítica.
Resultado: Δf mínimo (<±0.02 Hz), voltaje estator ±0.5%, cero lost-of-load en fallback.
Caso 2: Planta de Compresores con 3 GTG
Tres GTG alimentan compresores de media tensión en planta onshore, con frecuentes ciclos de carga.
- Droop Dinámico: Speed Bias adaptativo según producción de gas.
- Load Shedding: UFLS + contingency shedding para eventos de disparo simultáneo.
- Protección: 50/51 con coordinación basada en perfil de compresores.
- PQ Curve: Operación en 70% Pnom, Q=±20% para iluminación y filtros.
Balance dinámico permite rampas rápidas de producción sin comprometer estabilidad.
Caso 3: Isla-Interconectado Híbrido
Un sistema capaz de operar aisladamente o conectado a red local de planta, alternando sin interrupciones.
- Sincronización Automática: Check-sync con Vmeas, f y φ antes de reconexión.
- Transferencia Seamless: Drogada de AVR de PF a droop reactivo.
- PMS: Supervisión continua y cambio de estrategia de control según estado.
- CCC+DROOP: Modo dual que alterna CCC en isla y droop leve en red.
Transición completada en 2 s sin subidas de corriente significativas ni flicker perceptible.
17. Conclusiones
La integración de técnicas de control de velocidad (droop, isócrono, peer-to-peer), regulación de voltaje (V/Hz, CCC), protección eléctrica y filosofías de load shedding conforma un enfoque completo para sistemas de generación en modo isla e interconectado.
- Reparto de carga: Droop y peer-to-peer aseguran distribución de P, mientras CCC estabiliza voltaje.
- Estabilidad transitoria: Step load capability y VFDs mitigan impactos de arranque.
- Protección coordinada: Relés diferenciales y UFLS actúan con el control para aislar fallas sin colapso.
- PMS como núcleo: Supervisión, eventos y reconexiones automáticas unifican estrategias.
- Estándares: IEEE, IEC y NERC proporcionan el marco que respalda interoperabilidad y seguridad.
Estas recomendaciones, respaldadas por casos de aplicación y estándares, dan lugar a sistemas de generación robustos capaces de operar con alta confiabilidad y flexibilidad.